PID
PID概念认知¶
概念¶
比例(Proportional)、积分(Integral)、微分(Derivative)
它是根据给定值(期望值)和实际输出值(当前值)构成控制偏差(误差),将偏差按比例、积分和微分通过线性组合构成控制量,对被控对象进行控制。
公式¶
-
Kp:比例增益,用来调节反馈控制系统响应速度和稳定性。
增大Kp可以加快系统的响应速度,但可能导致系统震荡或超调;减小Kp则可能导致系统响应过慢。
输入偏差进行积分运算:直接与当前误差成比例,可以**快速响应误差的变化**,但容易导致系统振荡,会存在稳态误差。
-
Ki:积分增益,用来消除系统的稳态误差。
增大Ki可以减小系统的稳态误差,但可能导致系统的过度调节或振荡;减小Ki则可能导致系统无法消除稳态误差。
输入偏差进行积分运算:累积过去的误差,有助于消除静态误差,但可能导致系统响应缓慢或振荡。
-
Kd:微分增益,用来抑制系统的振荡和超调。
增大Kd可以减小系统的超调和振荡现象,但可能使系统对噪声和干扰更加敏感;减小Kd则可能导致系统的响应速度过慢。
输入偏差进行微分运算:预测误差的变化趋势,有助于减少系统的动态误差和振荡。
-
e(t):误差信号,是期望值和实际值之间的偏差。
相关术语¶
反馈:系统输出信号再次作为输入信号的一部分。
开环:系统输出不受系统状态的监测和调节,系统直接根据输入信号来产生输出。
闭环:系统通过监测系统输出信号,并与参考信号进行比较,然后对系统状态进行调节,以使输出接近参考值。
设定值:PID调节器设定值就是人们期待被调量需要达到的值。
输入偏差:被调量和设定值之间的差值。
动态偏差:在调节过程中,被调量和设定值之间的偏差随时改变,任意时刻两者之间的偏差叫做动态偏差。
稳态偏差:也叫做静态误差。自动控制系统在稳态下的控制精度的度量。控制系统的输出响应在过渡过程结束后的变化形态称为稳态。稳态误差为期望的稳态输出量与实际的稳态输出量之差。控制系统的稳态误差越小说明控制精度越高。
回调:调节器调节作用显示,使被调量开始由上升变为下降,或者由下降变为上升趋势成为回调。
PID算法分类¶
- 基础
- 增量式
- 位置式
- 改进
- 积分分离
- 抗积分饱和
- 变速积分
- 死区控制
- 不完全微分
- ……
位置式PID¶
位置式PID控制通过比较实际输出和期望输出的差异,并根据误差的大小来调整控制输出。
位置式离散PID公式¶
把 \(\Delta t\) 合并到常数系数 K 中
增量式PID¶
增量式PID控制不是直接使用误差值作为输入来计算控制输出,而是使用控制量的增量(即上一时刻和当前时刻的差值)作为输入。
给到控制器的输出值:
-
位置式PID需要对积分项累加,适用于系统对稳态误差要求较高的场合。
-
增量式PID不需要对积分项累加,适用于系统对响应速度要求较高的场合。
串级PID¶
PID输出值的物理意义由输出值作用的地方决定
串级PID:将上一个PID控制器的输出量作为下一个PID控制器的输入量。
graph LR
A[期望的位置] --> B[位置环PID控制器]
B --> C[速度环PID控制器]
C --> D[小车电机]
D --> E[新位置]
E --> |当前位置| B
D -->|当前速度| C通常而言,速度环比外环的位置环响应速度快3-5倍
单级与串级
- 单级
- 位置式PID可以让电机运转指定的圈数,但在运动过程中的速度控制相对较差。
- 增量式PID可以让电机运转指定的速度,但不直接控制电机的位置或角度。
- 串级
- PID内环:增量式PID,控制电机运转的速度
- PID外环:位置式PID,控制电机运转的距离/圈数
调参步骤
- 先单独调试速度环,使其具有良好的快速响应特性
- 再调整位置环参数,使其响应较慢但平稳
- 最后逐步优化两个路参数直至满足要求
平衡车的直立控制(PD)¶
物理分析¶
假设小车往右倾斜时,控制小车的车轮使小车作加速运动,加速度大小为 \(a\)。
受力分析示意图
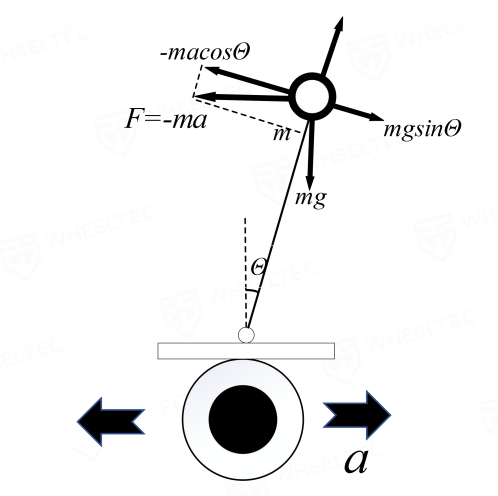
若以小车轮子为参考系(非惯性参考系)分析倒立摆受力,小车上方的圆球会受到一个方向与车轮加速度相反,大小与加速度成比例的惯性力。
\(F=mgsin \theta - ma cos \theta \approx mg \theta - mk_1 \theta\) (\(\theta\) 非常小 \(\rightarrow sin \theta = 0,cos \theta=1\);\(k_1\) 为加速度 \(a\) 与小车倾角的比例系数)
若 \(k_1 > g\),回复力的方向便与位移方向相反了。
而为了让倒立摆能够尽快回到垂直位置稳定下来,还需要增加阻尼力;增加的阻尼力与偏角的速度成正比,方向相反,因此公式可改为:
\(F = mg\theta - mk_1\theta - mk_2\theta' = mg\theta - m(k_1\theta + k_2\theta')\)(\(k_2\) 为阻尼力与角速度的比例系数,\(\theta'\)为角度的微分(即角速度))
按照倒立摆的模型,可得出控制小车车轮加速度的算法:只要保证 \(k_1 > g\),\(k_2 > 0\) 就可以使小车平衡。
根据上述内容,建立速度的比例微分负反馈控制,使平衡车通过闭环控制保持稳定的条件。
通过MPU6050测量平衡车的倾斜角度θ和角加速度θ',PD控制器根据测量到的倾斜角度和角加速度计算出控制信号,用于调整平衡车的速度,使车辆能够保持垂直立。
PD控制器¶
PID控制中微分(D)控制的主要作用是减少系统的动态误差和振荡,积分(I)控制的主要作用是消除静态误差。比例控制(P)可以快速达到设定的速度,微分(D)控制相当于阻尼力,可以有效抑制车模震荡。
实现代码¶
int Balance_PD(float Angle, float Gyro)
{
float Angle_bias, Gyro_bias;
int balance;
Angle_bias = Mid_Angle - Angle; // 求出平衡的角度中值和机械相关
Gyro_bias = 0 - Gyro;
balance = -Balance_Kp / 100 * Angle_bias - Gyro_bias * Balance_Kd / 100; // 计算平衡控制的电机PWM PD控制 kp是P系数 kd是D系数
return balance;
}
软件代码¶
平衡车PID控制基础:08-13教程只提供一个工程文件。
产品配套资料源码路径:附件 → 源码汇总 → 3.PID_Course → 08-13.Balanced_Car_PID